 o dicho para que se entienda, si moviéramos el stick 10° el servo se movería 10°.
o dicho para que se entienda, si moviéramos el stick 10° el servo se movería 10°.En cambio el movimiento exponencial consiste en aplicar una función en forma de curva, (exponencial claro, de ahí su nombre).
Un ejemplo de esto sería que si moviéramos el stick 10°, como en el ejemplo anterior, el servo solo se movería 4° (o lo que corresponda con la programación que hayamos aplicado) por lo que conseguimos suavizar el movimiento del servo con la misma cantidad de movimiento del stick.
Vamos a ver un gráfico para entenderlo mejor. En él vemos un exponencial negativo (que es el más usual). En el eje horizontal representaremos la posición del stick de la emisora, y en el eje vertical tenemos el movimiento del servo.
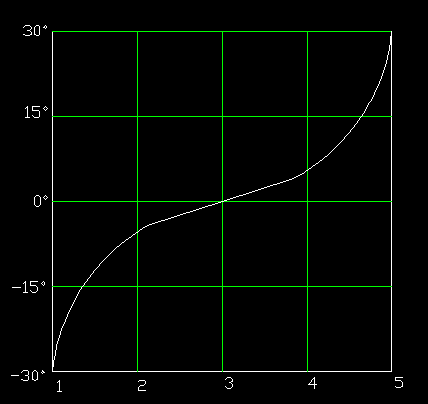 Si nos fijamos, al movimiento del stick en el sector central le corresponde un valor de salida en el servo mucho menor que si lo realizamos en el sector de los extremos, y como resultando una reacción más suave del modelo.
Si nos fijamos, al movimiento del stick en el sector central le corresponde un valor de salida en el servo mucho menor que si lo realizamos en el sector de los extremos, y como resultando una reacción más suave del modelo.Aquí, a diferencia de los dual rate, un mayor porcentaje significa un aumento en el poder de la función, osea que un exponencial del 50% "suavizara" más la relación stick-servo que uno del 20%.
Cabe destacar que el exponencial no reduce el movimiento final del servo como lo hace el dual rate. El exponencial deja el 100% del movimiento programado para el servo pero suaviza los movimientos cerca de la zona central (en el caso de exponenciales negativos).

Es un poco lioso, pero espero haberme explicado bién.
Buenos vuelos.
No hay comentarios:
Publicar un comentario